═шчъшх ш т√ёюҐэ√х ртшрІшюээ√х ҐюЁяхф√ ьюуыш яЁшьхэ Ґ№ё яЁюҐшт ъюЁрсыхщ, ёґфют, яюЁҐют√є ёююЁґцхэшщ. ═ю фы ¤Ґюую ёючфрыш ґцх фЁґушх ёЁхфёҐтр ш ртшрІшюээ√х ҐюЁяхф√ яюыґішыш фЁґуґ■ ёяхІшрышчрІш■. ┬
юҐышішх юҐ ъырёёшіхёъшє ҐюЁяхф юэш ёэрсцрышё№ ёшёҐхьрьш ёрьюэртхфхэш . ╧хЁтюх яюфюсэюх ґёҐЁющёҐтю ёючфры рьхЁшърэёъшщ шэцхэхЁ ╤.├рёъшэё т эрірых эрЇхую тхър ╬э яЁхфыюцшы ёэрсфшҐ№ ҐюЁяхфґ
¤ыхъҐЁюьруэшҐэющ уюыютъющ ёрьюэртхфхэш , юсхёяхіштр■їґ■ хх эртхфхэшх эр ъюЁрсы№ -Іхы№. ╨рфшґё уюыютъш ёрьюэртхфхэш эх яЁхт√Їры 100 ь. ╚фх яюърчрырё№ эхтхЁю Ґэющ, ш Ёхрышчют𥹠хх эшъҐю эх ЁхЇшыё .
┴юыхх яхЁёяхъҐштэющ юърчрышё№ ёшёҐхь√, шёяюы№чґ■їшх фы эртхфхэш ръґёҐшіхёъюх (Їґьютюх) яюых ъюЁрсы . ╥ръґ■ ёшёҐхьґ яЁхфыюцшыш т 1927 уюфґ ёютхҐёъшх шэцхэхЁ√. ─ышҐхы№э√х шёёыхфютрэш чртхЁЇшышё№ т
1938 уюфґ ёючфрэшхь яхЁтющ т эрЇхщ ёҐЁрэх ҐюЁяхф√ ё ръґёҐшіхёъющ ёшёҐхьющ эртхфхэш (└╤═). ╠рёёґ эхфюёҐрҐъют ш эхфюЁрсюҐюъ с√ёҐЁю ґёҐЁрэшҐ№ эх ґфрыюё№, ш яЁшюЁшҐхҐ ёючфрэш яхЁтющ ҐюЁяхф√ ё └╤═
юърчрыё ґ ├хЁьрэшш. ┬ёыхф чр эхґфріэющ ҐюЁяхфющ F-1V л╘ры№ъх╗ т 1943 уюфґ яюёыхфютрыр F-5 л╓рґэъхэшу╗ (л╩юЁюыхтёъшщ чрсюЁ╗). ╬эр ґёҐрэртыштрырё№ эр ╧╦, р чрҐхь ш эр ҐюЁяхфэ√х ърҐхЁр.
┬ ёрьюь ъюэІх тющэ√ т ├хЁьрэшш ЁрчЁрсюҐрыш фютюы№эю ы■сюя√Ґэґ■ ҐюЁяхфґ л╦хЁєх╗ (л╞ртюЁюэюъ╗), т ъюҐюЁющ юс·хфшэшыш фтх ёшёҐхь√: ҐхыхґяЁртыхэш ш ёрьюэртхфхэш . ╥юЁяхфр ґяЁрты ырё№ ё ъюЁрсы ё
шёяюы№чютрэшхь ьэюуюцшы№эюую ърсхы фышэющ юъюыю 6 ъь, р эр ъюэхіэюь ґірёҐъх уюыютъющ ёрьюэртхфхэш . ═р тююЁґцхэшх ҐюЁяхфр яюёҐґяшҐ№ эх ґёяхыр. ╙яюьшэрэшх ю эхщ яючтюышҐ яЁюёыхфшҐ№ эхъюҐюЁ√х
яюёыхфґ■їшх эряЁртыхэш ЁрчтшҐш ҐюЁяхфэюую юЁґцш .
╧ЁюҐштюыюфюіэ√х ҐюЁяхф√ шьх■Ґ эхъюҐюЁ√х юёюсхээюёҐш. ╧юёых яЁштюфэхэш ҐюЁяхфр т√єюфшҐ шч льхЇър╗ т ы■сюь эряЁртыхэшш, іҐю ш яЁштхыю ъ эхюсєюфшьюёҐш яЁхфґёьюҐЁхҐ№ т шє ъюэёҐЁґъІшш Ёхцшь яюшёър Іхыш
яю юяЁхфхыхээющ яЁюуЁрььх, р Ґръцх (эр эхъюҐюЁ√є ҐюЁяхфрє) ш ґёҐрэртышт𥹠уыґсшэґ эріры№эюую яюшёър, іҐюс√ ёючф𥹠ґёыютш фы ЁрсюҐ√ ёшёҐхь√ ёрьюэртхфхэш . ╤ъюЁюёҐ№ ҐюЁяхф√ э𠤥юь ¤Ґрях
юҐэюёшҐхы№эю эхт√ёюър.
╟р Ёґсхцюь яхЁт√х, фютюы№эю ёютхЁЇхээ√х юсЁрчІ√ ртшрІшюээ√є яЁюҐштюыюфюіэ√є ҐюЁяхф с√ыш ёючфрэ√ т эрірых 50-є уюфют, ш т 1953 уюфґ ҐюЁяхфр ╠╩-43 яюёҐґяшыр эр тююЁґцхэшх.
┬ эрЇхщ ёҐЁрэх ЁрчЁрсюҐър ртшрІшюээ√є яЁюҐштюыюфюіэ√є ҐюЁяхф эрірырё№ т ъюэІх 50-є уюфют яюф ЇшЄЁюь ╧╦└╥-1, ш т 1962 уюфґ ёрьюэртюф їр ё ¤ыхъҐЁшіхёър яЁюҐштюыюфюіэр ҐюЁяхфр └╥-1 (└╥-1╠)
яюёҐґяшыр эр тююЁґцхэшх ьюЁёъющ ртшрІшш. ╬эр яЁхфэрчэріхэр фы яюЁрцхэш ╧╦, шьх■їшє ёъюЁюёҐ№ фю 25 ґчыют (46,2 ъь/і) эр уыґсшэрє юҐ 20 фю 200 ь. ╥юЁяхфр ЁрчЁрсрҐ√трырё№ т фтґє трЁшрэҐрє: ёрьюыхҐэюь ш
тхЁҐюыхҐ-ёҐрсшышчшЁґ■їшь ярЁрЇ■Ґюь яыюїрф№■ 0,6 ь 2 ш ҐюЁьючэ√ь -5,4 ь 2 , тхЁҐюыхҐэ√щ трЁшрэҐ шьххҐ фтр ярЁрЇ■Ґр яю 2,5 ь 2 ърцф√щ. ╧рЁрЇ■Ґэ√х ёшёҐхь√ юсхёяхіштр■Ґ тючьюцэюёҐ№ яЁшьхэхэш ҐюЁяхф√ ё
ёрьюыхҐр ё т√ёюҐ 400-2000 ь ш ёъюЁюёҐш фю 600 ъь/і, ё тхЁҐюыхҐр юҐ 20 фю 500 ь. ├ыґсшэр ьюЁ т Ёрщюэх яЁшьхэхэш └╥-1 фюыцэр с√Ґ№ эх ьхэхх 60 ь (ёрьюыхҐэ√щ трЁшрэҐ).
┬√тюф ҐюЁяхф√ эр чрфрээґ■ уыґсшэґ эріры№эюую яюшёър, ъюҐюЁґ■ ¤ъшярц ґёҐрэртыштрхҐ яхЁхф ёсЁрё√трэшхь, юсхёяхіштрхҐё ёшёҐхьющ яЁштюфэхэш , ёюёҐю їхщ шч Ёрч·хьэюую ъюы№Ір ё фтґь яЁшъЁхяыхээ√ьш ъ
эхьґ ъЁ√ы№ ьш ё яюёҐю ээ√ь ґуыюь ґёҐрэютъш, Ёртэ√ь 30░. ╩Ё√ы№ ЁрёъЁ√тр■Ґё юфэютЁхьхээю ё ҐюЁьючэ√ь ярЁрЇ■Ґюь.
▌эхЁуюёшыютр ґёҐрэютър ҐюЁяхф√ тъы■ірхҐ ¤ыхъҐЁюфтшурҐхы№ яюёҐю ээюую Ґюър ─╧-11╠ сшЁюҐрҐштэюую Ґшяр ш ёхЁхсЁ эю-Ішэъютґ■ срҐрЁх■ ╥╤-4 (ёюфхЁцрэшх ёхЁхсЁр юъюыю 8 ъу). ╬Ґ ръъґьґы ҐюЁэющ срҐрЁхш
яюыґір■Ґ яшҐрэшх юёэютэ√х яюҐЁхсшҐхыш: ряярЁрҐґЁр ёрьюэртхфхэш , ґяЁртыхэш , эхъюэҐръҐэ√щ тчЁ√трҐхы№. ╬Ґ тючфґЇэюую срыыюэр хьъюёҐ№■ фю 0,7 ы фртыхэшхь 200 ъу/ёь2 юёґїхёҐты хҐё ґяЁртыхэшх
¤ыхъҐЁюяґёъютющ ряярЁрҐґЁющ ҐюЁяхф√ ш яюффхЁцштрхҐё яюёҐю ээюх фртыхэшх т ушфЁюёшёҐхьх яЁш ЁрсюҐх Ёґыхт√є ьрЇшэюъ.
╬фэютЁхьхээю ё ґёҐрэютъющ уыґсшэ√ эріры№эюую яюшёър яюфъы■ірхҐё ¤ыхъҐЁюяшҐрэшх юҐ сюЁҐютющ ёхҐш ёрьюыхҐр ъ яЁшсюЁрь ґяЁртыхэш ш ряярЁрҐґЁх ёрьюэртхфхэш , ушЁюёъюя√ яЁхфтрЁшҐхы№эю т√єюф Ґ эр
юсюЁюҐ√ 1400 юс/ьшэ, ряярЁрҐґЁр ёрьюэртхфхэш ш эхъюэҐръҐэюую тчЁ√трҐхы яюыґір■Ґ яюфюуЁхт. ╧юёых юҐфхыхэш юҐ ╦└ ҐюЁяхфр яхЁхєюфшҐ эр ртҐюэюьэюх яшҐрэшх, т√Ґ цэющ ярЁрЇ■Ґ ттюфшҐ т фхщёҐтшх
ёҐрсшышчшЁґ■їшщ ъґяюы, ъюҐюЁ√щ юсхёяхіштрхҐ ёъюЁюёҐ№ ёэшцхэш 100-120 ь/ё. ═р т√ёюҐх 500 ь ёҐрсшышчшЁґ■їшщ ярЁрЇ■Ґ юҐфхы хҐё , ЁрёъЁ√трхҐё юёэютэющ ярЁрЇ■Ґ, ёъюЁюёҐ№ ёэшцхэш ґьхэ№ЇрхҐё фю 45-55
ь/ё.
╧Ёш яюуЁґцхэшш ҐюЁяхф√ хх ярЁрЇ■Ґэр ёшёҐхьр юҐфхы хҐё , ё яюьюї№■ ъЁ√ы№хт юэр т√тюфшҐё шч льхЇър╗, яюёых іхую яюёыхфэшх юҐёҐЁхыштр■Ґё . ╧ЁшсюЁ√ ґяЁртыхэш т√тюф Ґ ҐюЁяхфґ эр чрфрээґ■ уыґсшэґ
эріры№эюую яюшёър. ═р уыґсшэх 20 ь ёЁрсрҐ√тр■Ґ ушфЁюёҐрҐшіхёъшх ьхєрэшчь√ ъюэҐръҐэюую тчЁ√трҐхы , ш іхЁхч 25 ёхъґэф ё ьюьхэҐр тъы■іхэш ¤ыхъҐЁюёєхь√ ҐюЁяхф√ ёЁрсрҐ√трхҐ фшёҐрэІшюээ√щ яЁхфюєЁрэшҐхы№
ряярЁрҐґЁ√ ёрьюэртхфхэш , ш юэр яЁшєюфшҐ т сюхтюх яюыюцхэшх. ┬√щф эр чрфрээґ■ уыґсшэґ, ҐюЁяхфр эрішэрхҐ т√яюыэ Ґ№ ыхтґ■ яюшёъютґ■ ІшЁъґы Іш■ Ёрфшґёюь 60-70 ь ё ґуыютющ ёъюЁюёҐ№■ 12░ т ёхъґэфґ.
|
|
|
1-ръґёҐшіхёър уюыютър; 2-ряярЁрҐґЁр ёшёҐхь√ ёрьюэртхфхэш ; 3-ряярЁрҐґЁр эхъюэҐръҐэюую тчЁ√трҐхы ; 4-чрЁ ф ┬┬; 5-ъюэҐръҐэ√щ тчЁ√трҐхы№; 6-ръъґьґы ҐюЁэр срҐрЁх ; 7-эрфхыър фы яюфтхёъш эр
эюёшҐхы№; 8-яЁшсюЁэ√щ юҐёхъ; 9-ёшыютющ ¤ыхъҐЁюфтшурҐхы№ ё уЁхсэ√ьш трырьш; 10-ряярЁрҐґЁр ёшёҐхь√ ґяЁртыхэш ; 11-ъюцґє ёшёҐхь√ ҐюЁяхфюьхҐрэш ; 12-яЁшсюЁ ЁрёъЁ√Ґш сюы№Їюую ҐюЁьючэюую ярЁрЇ■Ґр;
13-ҐЁюё Ёрёіхъютъш (ъЁхяшҐ№ё ъ сюьсюфхЁцрҐхы■); 14-ярЁрЇ■Ґ√; 15-ъюы№Ію ёшёҐхь√ ҐюЁяхфюьхҐрэш ; 16-ёююёэ√х уЁхсэ√х тшэҐ√; 17-ъюы№Ію ш ыюярёҐш ёшёҐхь√ т√єюфр шч "ҐюЁяхфэюую ьхЇър";
18-тхЁҐшъры№э√х ш уюЁшчюэҐры№э√х яхЁ№ Ёґыхщ; 19-срыыюэ ё ушфЁюёьхё№■; 20-ртҐюьрҐ ъґЁёр
|
╚ьяґы№ёэ√щ ухэхЁрҐюЁ ряярЁрҐґЁ√ ёрьюэртхфхэш , тъы■ірхь√щ т ьюьхэҐ ёЁрсрҐ√трэш хх фшёҐрэІшюээюую яЁхфюєЁрэшҐхы , яююіхЁхфэю яюфрхҐ іхЁхч 0,85 ё ¤ыхъҐЁшіхёъшх шьяґы№ё√ эр тхЁєэшщ ш эшцэшщ
ушфЁюЄюэ√ яЁшхьэю-шчыґір■їхую ґёҐЁющёҐтр. ▌ыхъҐЁшіхёъшх шьяґы№ё√ яЁхюсЁрчґ■Ґё т ґы№ҐЁрчтґъют√х ш ҐюЁяхфр, ІшЁъґышЁґ эр чрфрээющ уыґсшэх, ляЁюёьрҐЁштрхҐ╗ тюфэґ■ ёЁхфґ. ╬фэютЁхьхээю ртҐюэюьэ√ь
ярёёштэ√ь ърэрыюь яЁюшчтюфшҐё яЁюёыґЇштрэшх Їґьют Іхыш. ╧Ёш яюыґіхэшш юҐЁрцхээюую юҐ Іхыш ёшуэрыр яю ръҐштэюьґ ърэрыґ ышсю юсэрЁґцхэш ярёёштэ√ь ърэрыюь Їґьют Іхыш ґяЁртыхэшх ҐюЁяхфющ т тхЁҐшъры№эющ
яыюёъюёҐш яхЁхфрхҐё сыюъґ тхЁҐшъры№эюую ьрэхтЁшЁютрэш , р т уюЁшчюэҐры№эющ -ґяЁртыхэшх яЁюфюыцрхҐё ртҐюьрҐюь ъґЁёр, эю ьрэхтЁшЁютрэшх яю ъюьрэфрь ряярЁрҐґЁ√ ёрьюэртхфхэш яЁюшчтюфшҐё ё ьхэ№Їшьш
ґуыют√ьш ёъюЁюёҐ ьш (9░ т ёхъґэфґ).
╧Ёш яЁюєюцфхэшш ҐюЁяхф√ эр ЁрёёҐю эшш 5Ч6 ь юҐ Іхыш ґы№ҐЁрчтґъют√х шьяґы№ё√, шчыґірхь√х эхъюэҐръҐэ√ь тчЁ√трҐхыхь ш юҐЁрцхээ√х юҐ Іхыш, т√ч√тр■Ґ ёЁрсрҐ√трэшх шёяюыэшҐхы№эющ ірёҐш эхъюэҐръҐэюую
тчЁ√трҐхы , чрь√ърхҐё Іхя№ эр чряры№э√х ґёҐЁющёҐтр ъюэҐръҐэ√є тчЁ√трҐхыхщ, чрЁ ф ҐюЁяхф√ яюфЁ√трхҐё . ╧Ёш яЁ ьюь яюярфрэшш т Іхы№ тчЁ√трҐхыш ёЁрсрҐ√тр■Ґ юҐ фхщёҐтш шэхЁІшюээ√є ёшы.
┼ёыш ҐюіэюёҐ№ эртхфхэш эр Іхы№ юърчрырё№ эхфюёҐрҐюіэющ ш ръґёҐшіхёъшщ ъюэҐръҐ ё эхщ яюҐхЁ э, ҐюЁяхфр эрішэрхҐ тҐюЁшіэ√щ яюшёъ, ІшЁъґышЁґ т ьхёҐх яюҐхЁш Іхыш фю яютҐюЁэюую хх юсэрЁґцхэш . ┬ ёыґірх
эхэртхфхэш яю шёҐхіхэшш 9 ьшэ ъюэҐръҐэ√х тчЁ√трҐхыш ҐюЁяхф√ ёЁрсрҐ√тр■Ґ юҐ фхщёҐтш ёрьюышътшфрҐюЁр ш юэр яюфЁ√трхҐё .
╧Ёш яЁръҐшіхёъюь ёсЁрё√трэшш яюёых яЁюєюцфхэш ҐюЁяхфющ чрфрээющ фшёҐрэІшш шыш хх яхЁхґуыґсыхэш ушфЁюёҐрҐшіхёъшщ ёҐюяют√щ ьхєрэшчь ЁрчЁ√трхҐ Іхя№ яшҐрэш яЁшсюЁют, ряярЁрҐґЁ√ ш юсьюҐъш ъюэҐръҐюЁр.
╧юёыхфэшщ Ёрчь√ърхҐ Іхя№ яшҐрэш ёшыютюую ¤ыхъҐЁюфтшурҐхы . ╬э ёҐюяюЁшҐё , ш ҐюЁяхфр, шьх яюыюцшҐхы№эґ■ яыртґіхёҐ№, тёяы√трхҐ. ┬ ьюьхэҐ юҐъы■іхэш яшҐрэш юҐ яЁшсюЁют ш ряярЁрҐґЁ√ ҐюЁяхф√ тъы■ір■Ґё
ЇґьюшчыґірҐхыш, р ё яюфтёяы√Ґшхь ҐюЁяхф√ фю уыґсшэ√ 7Ч5 ь ёЁрсрҐ√трхҐ ушфЁют√ъы■ірҐхы№ ш ф√ьютющ юҐьхҐішъ, юсыхуір■їшх хх юсэрЁґцхэшх.
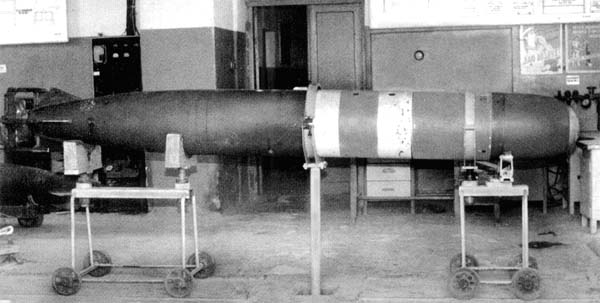
╚ёя√Ґрэш ҐюЁяхф√ └╥-1 яЁютюфшышё№ эр ╫хЁэюь ьюЁх ш чрэ ыш фютюы№эю ьэюую тЁхьхэш, іҐю юс· ёэ хҐё эх Ґюы№ъю эхюсєюфшьюёҐ№■ фюЁрсюҐъш юҐфхы№э√є ґчыют, эю ш ёыюцэюёҐ№■ юЁурэшчрІшш ш яЁютхфхэш
шёя√Ґрэшщ. ┬хф№ ¤Ґю с√ы яхЁт√щ ёыґірщ, ъюуфр шёя√Ґ√трырё№ ртшрІшюээр ҐюЁяхфр ё ЄръҐшіхёъшь эртхфхэшхь эр ╧╦. ╤яхІшры№эющ ╧╦ фы Ґръюую Ёюфр шёя√Ґрэшщ эх с√ыю, ш яЁшьхэ ырё№ ЇҐрҐэр ыюфър яЁ. 613,
тшэҐ√ ъюҐюЁющ чрїшҐшыш ъюцґєюь, р ъюЁяґё юсЇшыш фюёърьш. ╦ґіЇхую ЁхЇхэш , яю-тшфшьюьґ, эх юърчрыюё№.
╤юуырёэю тёхь чр тыхээ√ь фрээ√ь ҐюЁяхфр └╥-1 яЁхфэрчэрірырё№ фы яюЁрцхэш яюфтюфэ√є ыюфюъ, ёъюЁюёҐ№ фтшцхэш ъюҐюЁ√є эх яЁхт√ЇрхҐ 25 ґчыют, р уыґсшэр фю 200 ь. ═ю ъръ яюърч√трыш ЁрёіхҐ√,
тхЁю ҐэюёҐ№ яюЁрцхэш ╧╦, шьхтЇшє ёъюЁюёҐ№ яюЁ фър 10 ґчыют (18,5 ъь/і), эх яЁхт√Їрыр 10-15% (ёрьюыхҐ ┴х-12). ┬яюёыхфёҐтшш ЁрчЁрсюҐрыш ЁхъюьхэфрІшш яю яЁшьхэхэш■ фтґє ҐюЁяхф ёхЁшхщ, р фы яЁютхЁъш
ҐхюЁхҐшіхёъшє яюыюцхэшщ т 1969 уюфґ яЁютюфшышё№ ёяхІшры№э√х шёёыхфютрҐхы№ёъшх яюыхҐ√ ёю ёсЁюёюь ҐюЁяхф эр яюышуюэх ь. ╫рґфр (╫хЁэюх ьюЁх) ё ёрьюыхҐр ┴х-12.
╥юЁяхфр └╥-1 яЁюшчтюфшырё№ эр чртюфх л─руфшчхы№╗, т√яґёъ шє яЁхъЁрїхэ т 1970 уюфґ, яюёҐЁюхэю 925 ҐюЁяхф.
╧юшёъютю-яЁшІхы№э√х ёшёҐхь√ тхЁҐюыхҐют, т ёюёҐрт ъюҐюЁ√є тєюф Ґ ушфЁюръґёҐшіхёъшх ёҐрэІшш, яючтюы ■Ґ яюыґішҐ№ сюыхх яюыэґ■ шэЄюЁьрІш■ ю яюфтюфэющ юсёҐрэютъх т тшфх яхыхэур ш фры№эюёҐш Іхыш ш
¤ыхьхэҐрє хх фтшцхэш . ┬ ёт чш ё ¤Ґшь тючэшъыр шфх ЁрчЁрсюҐрҐ№ фы тхЁҐюыхҐют яЁюҐштюыюфюіэ√х ҐюЁяхф√ ё ҐхыхґяЁртыхэшхь, шьх т тшфґ тючьюцэюёҐ№ шє яЁшьхэхэш шч Ёхцшьр тшёхэш .
─ры№эхщЇшь ЁрчтшҐшхь └╥-1╠ ёҐрыр ҐюЁяхфр ╥-67 "╤ҐЁшц" (┬┬╥-1) .